APM:Copter参考手册目录4.6-测量振动
APM:Copter参考手册目录4.6-测量振动
测量振动
减少振动水平能让飞控保持更好的气压定高和悬停性能。 下面将告诉你如何进行振动水平测试。 如果你发现结果很差,你应该参考初次安装向导章节的消除振动页面,以及做好相应的减震措施,如使用3d打印的apm专用减震器。
请按照以下步骤执行,以确保你的振动水平在允许范围内:
1.连接你的APM/PX4 到 Mission Planner
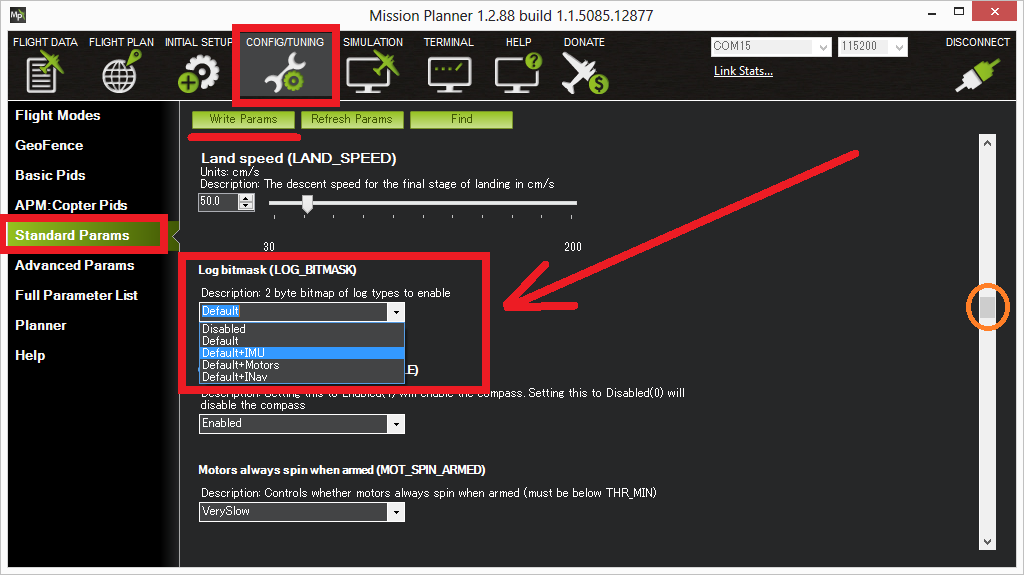
2.进入 配置/调试 > Standard Params 界面然后设置Log bitmask为Default+IMU。 这将使捕获的加速度计数据存储在闪存日志中。
3.按“Write Params”按钮
用自稳模式飞行你的飞行器,并且尽量保持在一个水平范围内。(它不需要完全稳定或水平)
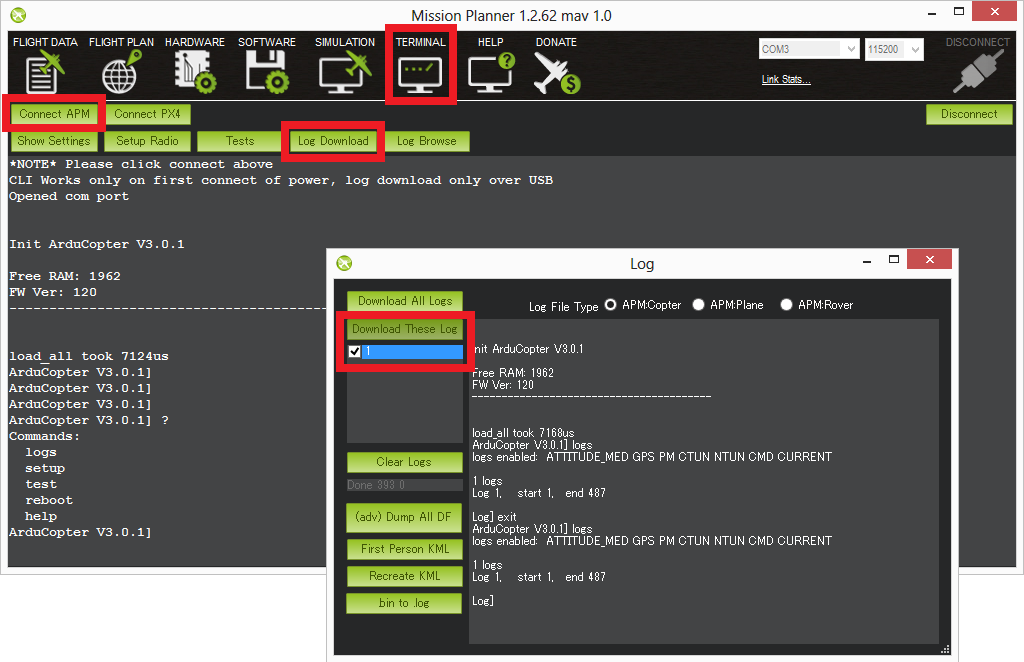
断开锂电,重新连接你的APM/PX4 到mission planner
用终端界面下载最新的闪存日志(更详细的闪存日志工作原理说明在这里)
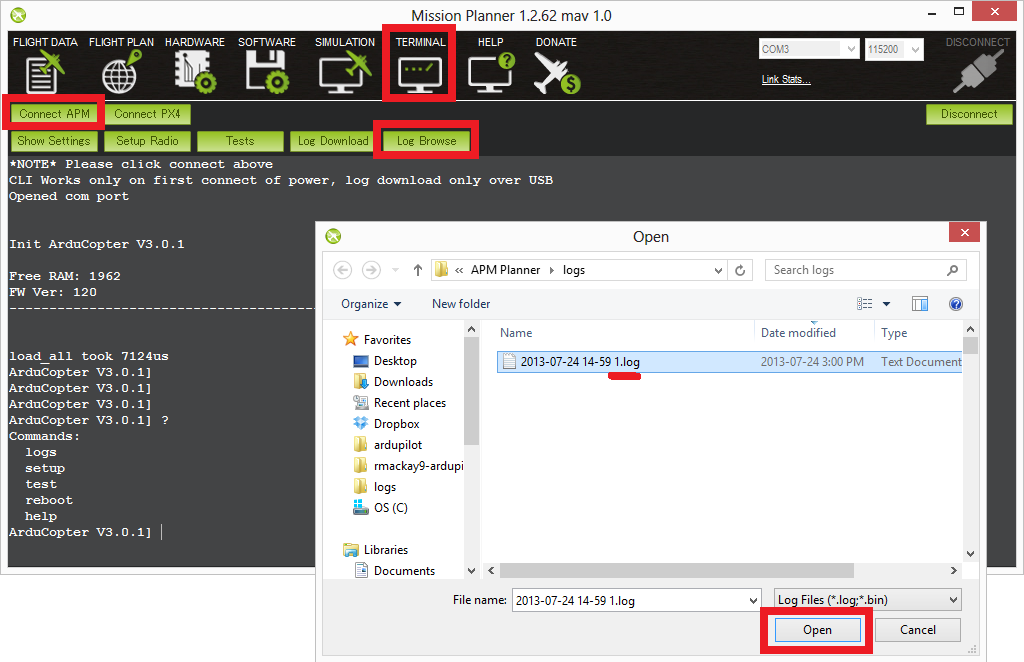
你下载完成后,关闭“log”窗口,然后按“Log Browse”按钮,会直观的显示最后一次的数据日志文件(最后一位是日志的下载排序数,例如下载日志#1,文件名将会是1.log)
当日志浏览器出现你的传感器数据时。 点击 AccX 按 “Graph this data Left” 按钮。 重复AccY和AccZ列生成下面的图像。
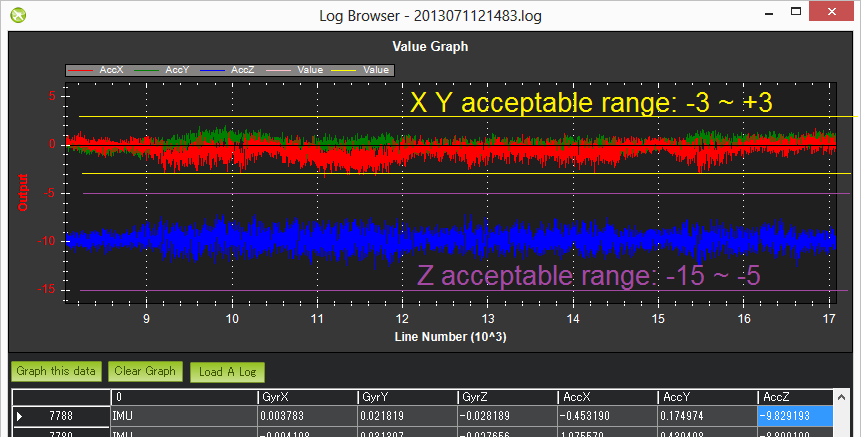
检查左侧的标尺,并确保你的振动水平在AccX和AccY -3至+ 3之间。 AccZ可接受的范围是-15到-5。 如果它非常接近或超过这些限制,你应该去参考消除振动页面提供的解决方案。
以上完成后,到Mission Planner的标准参数页面(您可能需要再点击“连接”按钮一次)并设置Bitmask back为“默认”。 这是很重要的,因为特别是APM日志需要大量的CPU资源,如果不需要日志,这是一个很浪费的行为。