APM:Copter参考手册目录3.3-加载固件到APM上
APM:Copter参考手册目录3.3-加载固件到APM上
APM固件是操作你的自动驾驶仪的大脑,由专门的开源社区创建与维护。下载最新固件到APM上是初次安装的一个非常重要的部分,并且当升级APM的现有固件时也会用到。这些操作说明告诉你如何下载最新固件到APM上。
目录
1 加载固件到APM上
2 连接APM到计算机
3 连接APM到Mission Planner
4 选择固件
5 连接到MavLink
连接APM到计算机
在你的地面站计算机上下载好Mission Planner后,连接APM到你的计算机,你需要使用Micro USB连接线连接到APM的Micro USB接口。请将USB接口直接连到你的计算机上,不要使用USB hub。

Windows会自动detect APM and安装正确的驱动软件。如果你收到提示说“未找到驱动”,跟随这些操作说明来手动下载软件。
连接APM到Mission Planner
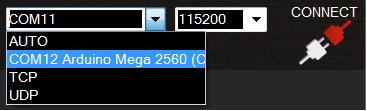
接下来我们要让Mission Planner知道哪个端口是我们用来连接APM的。打开Mission Planner,使用屏幕右上角的下拉菜单(在Connect按钮旁边)来连接APM。如图所示选择Arduino Mega 2560并把波特率设为115200 。这时不要点击连接。
选择固件
现在我们要选择下载那个固件到APM;这取决于你的飞机的结构。在显示器上方的图标中选择固件选项卡。选择你的飞行器的机架通过单击相符的图标:四轴,六轴,Y6,飞机,无人车,或者其他的。(我们稍后会详细说明 + 或 x 结构。)
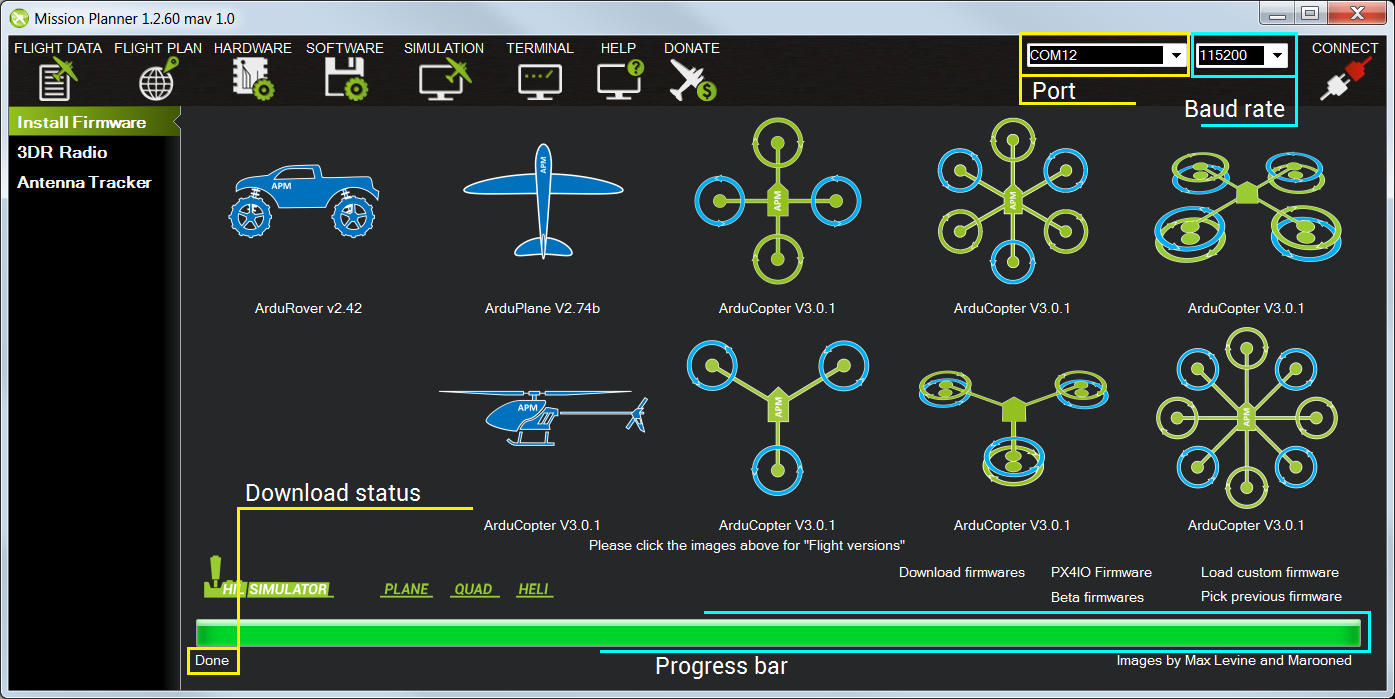
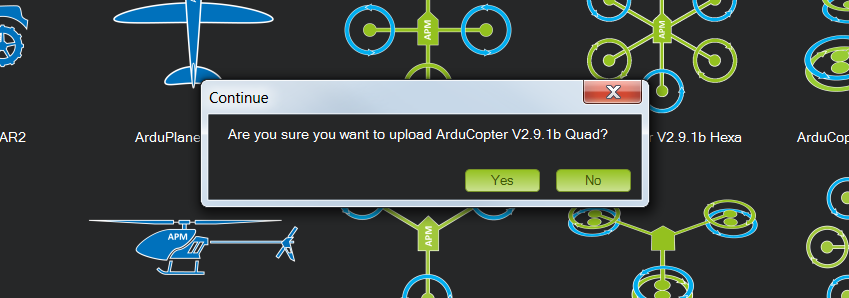
一旦你选择了你的机架,Mission Planner就会自动 检测用于你的飞机的最新固件版本,并提示你确认下载。选择是来下载固件到APM上。当下载状态条读完,你的固件下载就完成了。
连接到MavLink
选择Connect (屏幕右上角)来给APM加载MavLink参数。 Mission Planner会显示一个窗口显示MavLink的下载进度。
当窗口显示Done并且Mission Planner在Connect位置显示为Disconnect选项时,说明你的APM固件已下载成功。