APM:Copter参考手册目录3.1.2-连接你的遥控输入和电机(Pixhawk)
APM:Copter参考手册目录3.1.2-连接你的遥控输入和电机(Pixhawk)
目录
1 连接你的遥控输入和电机(Pixhawk)
2 连接蜂鸣器和安全开关
3 连接其他外部设备
4 连接遥控输入
5 连接电机输入
6 安装螺旋桨
7 顺时针和逆时针桨的识别
连接蜂鸣器和安全开关
蜂鸣器和安全开关依附于Pixhawk。 分别连接到蜂鸣器和开关端口。

连接其他外部设备
3DR电源模块 (有图): 用6线DF13电缆连接电池模块至Pixhawk的电源端口。
3DR GPS+罗盘 (有图): 用6线DF13电缆连接至GPS端口,4线DF13电缆连接至MAG端口。
3DR u-blox GPS: 连接GPS(只有GPS,无罗盘)至Pixhawk,使用改装后的6线DF13连接头,而不是原来的6线JST连接头。 使用这个GPS模块或其他的GPS(只有GPS,无罗盘)模块,Pixhawk会自动使用其内部罗盘。
3DR 数传 V2 (有图): 用6线DF13电缆连接AIR模块至TELEM 1端口。
3DR 数传 V1: 连接AIR模块至Pixhawk,使用改装后的6线DF13连接头,而不是原来的5线连接头。

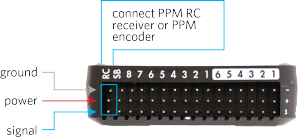
连接遥控输入
Pixhawk兼容PPM RC接收器,Funtaba S.Bus 接收器,Spektrum DSM,DSM2, 和 DSM-X 卫星接收器。 对于传统的每个通道一条数据线的接收器,可以用一个 PPM 编码器 把所有通道的输出汇成一条数据线。 更多信息可查看 这个页面。
连接 PPM 接收机,Futaba S.Bus 接收器,或 PPM 编码器,黑线接地红线电源正极白色的信号线连接至遥控引脚。 注意: 目前不支持Futaba S.BUS2。 支持的S.BUS型号(已测试可用): R2008SB,R6008SB。
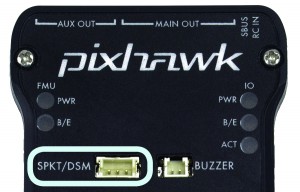
对于 Spektrum DSM,DSM2,或 DSM-X 卫星 接收机,连接 SPKT/DSM 端口。
To power Pixhawk off the servo rail without a power module,连接舵机或电调至主输出的电源正级(+)和地(-)。 When powering Pixhawk off the servo rail,我们推荐加一个齐纳二级管 (型号1N5339) to condition the power across the rail 防止电压过高。 当使用电源模块时,这种方法(结合齐纳二级管)可以作为Pixhawk的备份电源,所以当电源模块失效时,Pixhawk will take power from the output rail. 在下面的Pixhawk电源部分,参看电压范围信息。
注意: 齐纳二级管结合舵机使用电压不得高于5V。


额定电压
正常运行最大额定参数
电源模块(4.1V 至 5.7V)
舵机轨道(4.1V 至 5.7V)UP TO 10V FOR 手动 OVERRIDE,但如果电源模块的输入不存在,自动驾驶仪将电源部分高于5.7 v
USB输入电源(4.1V 至 5.7V)
绝对最大额定值
在这个条件下,系统不会损耗任何电量(停止运行),但是仍然有效的。
电源模块输入(0V 至 20V)
舵机轨道(0V 至 20V)
USB输入电源 (0V 至 6V)
连接电机输入
- 连接地线至主要输出引脚(上面一排)。
- 这一排引脚是电源输入端至Pixhawk,另外至–或者取代电源模块,可以作为小电流舵机的公共点。
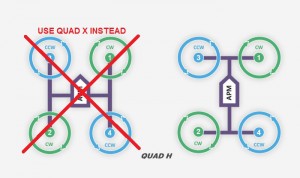
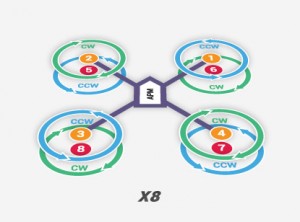
- 找到适合你的机架类型电机顺序图(点击放大)。 通过丝印的电机编号连接电机的电调信号线至Pixhawk的主要输出信号引脚




注意: 2014 3DR RTF Y6使用Y6B配置。
安装螺旋桨
在上面电机顺序中找到对应机架。 逆时针电机以蓝色显示,标CCW,并采取拉式螺旋桨。 逆时针电机以蓝色显示,标CCW,并采取拉式螺旋桨。 先择你的机架类型,按图安装好你的桨。 For copters, attach propellers with the writing facing towards the sky. 更多不同类型桨识别,参看下文。
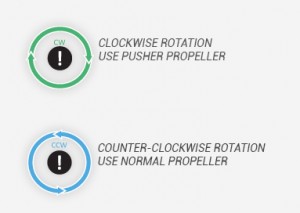
顺时针和逆时针桨的识别
上面的图表展示两种类型的螺旋桨:顺时针方向(称为反桨)和逆时针(称为正桨)。 推进器螺旋桨通常标有P。然而并非所有的螺旋桨被标记和这两种类型通常可以在任一旋转方向。 因此,按照如下桨的形状来判断是比较可靠的。 Note that the propellers below have the edge with the shallow consistent curve at the leading edge in direction of rotation and the more radical scalloped (and usually thinner edge) as the trailing edge. 你可以参考这些特征,正确的识别桨的方向。
