APM:Copter参考手册目录7.1-APM2.5和2.6概览
APM:Copter参考手册目录7.1-APM2.5和2.6概览
目录
1 APM2.5和2.6概览
2 APM 2.6
3 APM 2.5/2.6外壳的使用
4 不用外壳
5 APM 2.5/2.6的供电
6 可选择的飞控板供电方式
7 供电需求的非技术描述
8 供电系统连接要求(JP1安装)
8.1 无电源模块和舵机,且使用ESC的BEC供电
8.2 无电源模块但要使用舵机,且有大功率外置BEC
8.3 无电源模块但要使用舵机,且有多个ESC的BEC(每个舵机用一个BEC)
9 供电系统不连接的要求(JP1不安装)
9.1 有电源模块无舵机
9.2 有电源模块且使用舵机和外置BEC
9.3 有电源模块且使用ESC的BEC给舵机供电
9.4 无电源模块且使用连个ESC的BEC给舵机供电
10 APM供电布线举例
11 在APM板底部焊接跳线的说明
11.1 APM2.5飞控板的特性
11.2 APM2.5飞控板的可选择装配件
12 模拟输入针脚
13 数字输出针脚
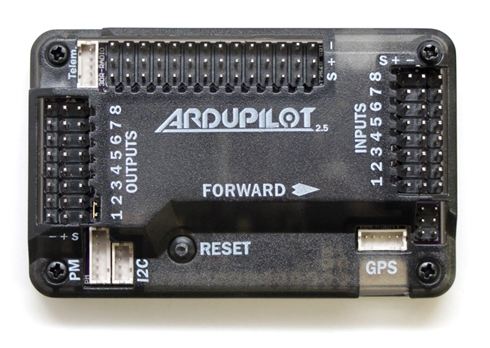
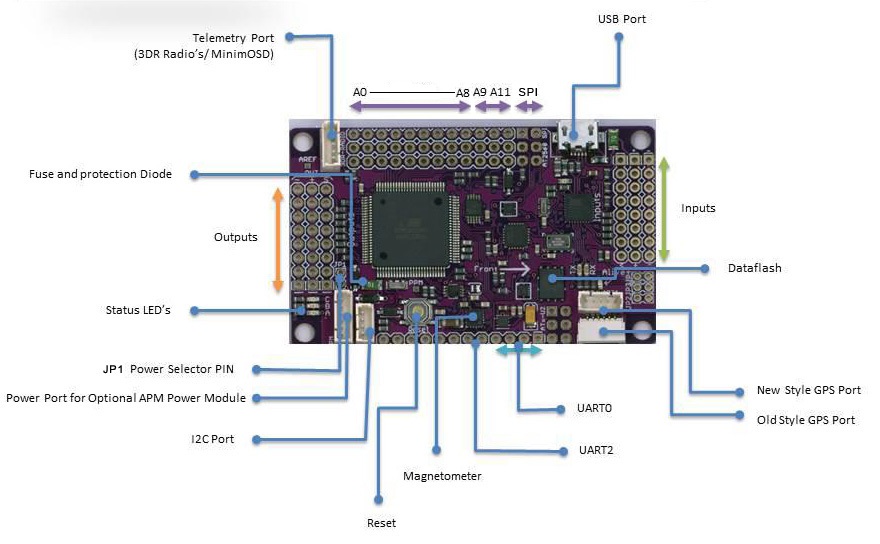
APM2.5和2.6概览
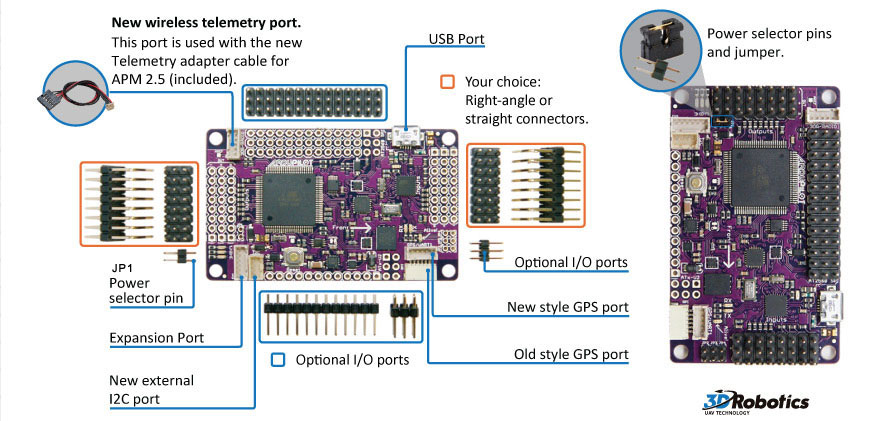
APM2.5飞控板无需装配,只要下载固件。 可选择直针或弯针,以便设备的安装。 当你订购时会看到此选项。
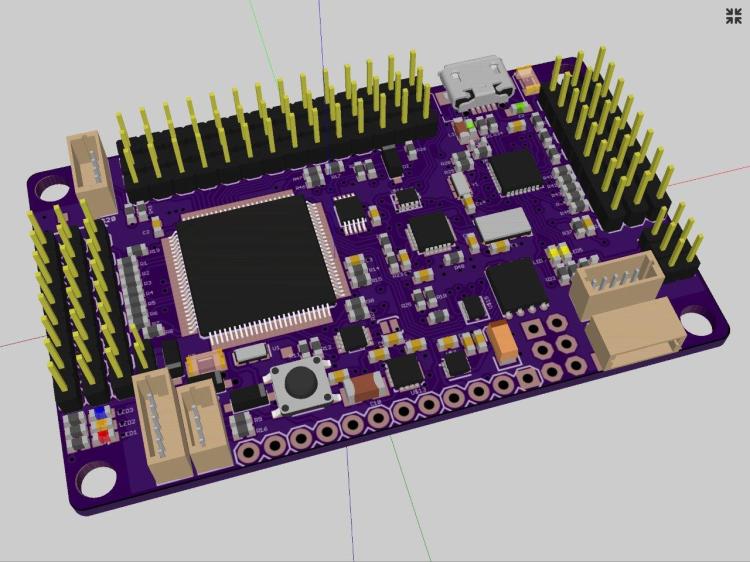
***单击上图并拖动可旋转它!
这个页面向你揭示了飞控内部,可以看到更多飞控板的设计细节。
APM2.5在APM2.0的基础上做了些改进,但是它们在布局和功能上很相似。
APM 2.6
APM2.6是APM的改进版,使用了外置磁力计(罗盘)。
APM2.6没有内置罗盘,这对飞行器是一个优化,罗盘应尽可能远离电源和电机等磁场干扰。
APM2.6设计成与带内置罗盘的3DR GPS uBlox LEA-6模块一起使用。
GPS/罗盘模块相比APM可以安装的远离干扰源。
APM2.6需要一个带罗盘的GPS来实现全部自动功能。
需带罗盘3DR GPS uBlox LEA-6的安装信息,请访问(这里!)。
APM 2.0详情。

、
APM 2.5/2.6外壳的使用
如下图所示,APM 2.5/2.6飞控板安装在一个带泡沫(用来保护气压传感器)的外壳中。
不用外壳
如果你不实用外壳,要在气压计上覆盖多空泡沫、化妆棉或纸巾,避免它被桨下气流、风和湍流干扰。 另外气压计容易受到光的影响,阳光下到遮阳处读数会差好几米。 某些类型的遮光罩(上覆泡沫)可以减小光照的影响。

APM 2.5/2.6的供电
和任何计算机一样,APM需要稳定纯净的电压和充足的电流。
3DR提供一款APM电源模块,5.37V时可输出2.25A。
该模块可以从主飞行电池取电(最大18V)。
可为APM、小功率无线电(包括没有连舵机的接收机)提供充足电源。
遥控器接收机可从任意APM输入端口取电(+5V和地线)。
通常可以用2到3芯线来连接APM的输入端和接收机的一个输出端。
如要使用任何舵机(如传统直升机或相机云台),需要给舵机提供额外的专用电源。
APM只控制舵机,不供电。
要给APM设计供电,或者提供额外电源,你需要对APM的电源电路有一个基本的了解。
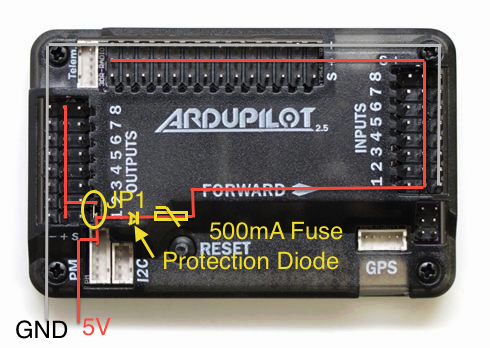
板子上有两个正极回路接口。 每个接口都有正极接口,可以供电或分配电力给周边设备。
在三组排针(输入、输出、模拟)的中心针,标记为“+”被称为正极。
这意味着所有的正极连在一起形成简单的电路路径。
输入和模拟的正极组连接在一起。
因此我们有两个单独的正极回路,一个在输出端,另一个在输入/模拟端。
板上的组件都是从这些针脚的某个取电,所以为了实现板上的功能,两个回路都需要有+5V输入(下面会说明)。
可以通过在板上安装JP1跳线帽,让这些正极端口连接起来。 这样就使所有的正极连接起来给板子的两侧供电,所以可通过电源接口给外围感应器或设备提供小功率电源: 3DR数传、声纳、接收机等。
如使用电源模块,电路如下:
电源模块的负极和整个板子的负极相连,不用管JP1。
正极电接入T型插头。左侧通过JP1连接正极到输出端口。
右侧流经过压过流反向保护(500mA 保险丝和6V稳压二极管)。
经过稳压二极管的负面影响就是损失0.37V电压,因此输入电压要升高0.37V。 正极电从这里流到输入和模拟的正极端子。
输入端除了接收机请勿给其他设备供电。
类似舵机这样的高电流负荷设备需要从输出端口的端子(正负极)取电。
你必须使用适当的稳压器直接给输出端口供电,所有的舵机电源线也会接到类似的端子上(使用相机云台时把信号线接在模拟端的“S”针)。
在JP1移除后,另一端需要通过自己的端口直接供电。
可选择的飞控板供电方式
3DR电源模块
如果你使用3DR电源模块,可以在这里找到说明:
使用3DR电源模块
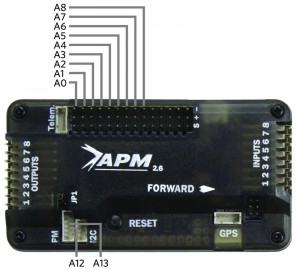
警告! 决不允许舵机从模拟输入端取电。
警告: 可以用A0 – A11 I/O端的A9, A10 和 A11控制舵机,但必须单独给舵机供电。
A0 – A11 I/O端无法给舵机提供足够的电源。
I/O端的A9, A10 and A11已经预先为舵机控制修正为数字输出。
使用舵机时,至关重要的是未用APM板子背面的焊盘,在模拟端中重新给它们分配。
供电需求的非技术描述
以下描述是对上述信息的简单补充,也提供了另一个视角。
APM 2.5/2.6有两个单独的电源电路,因此可以通过各种方法供电。
带保险丝的电路给主板和通用I/O端供电。 (它不能给舵机供电)。
另一个电路是给输出端口供电。 (它能给舵机供电)。
JP 1跳线帽决定了两个电路是连接还是分开。
JP 1移除,输出端口独立,可用来分配电源。
尽管JP 1移除了,输出端口也不能给APM供电。
可以通过电源模块端口、输出端或输入端给APM供电。
通常电源APM 2.5/2.6的电源模块主要给APM主板和通用I/O端口供电。
可以通过ESC的BEC或外置BEC给主板供电。
如果使用舵机,需要额外的电源。
通常,一个电源给主板供电,一个或多个电源给舵机供电。
但一个充足的外置BEC可以通过输出端口同时给两者供电。
只有输出端口可以给舵机供电,另一个电路装有保险丝。
地址端口有时候用来提供舵机信号,但舵机电源需要从其他地方接。
JP1跳线安装还是移除决定了你如何给APM和舵机供电。
(无论两个电路接通还是分开)。
所有可能的搭配在下面详细说明。
使用类型决定了哪个方式是可用的。
APM:Copter可通过电源模块、UBEC或一个ESC的BEC给APM供电,UBEC或ESC的BEC还可给舵机供电。
APM:Plane可通过电源模块、电机ESC的BEC或外置UBEC给APM供电,外置UBEC或电机ESC的BEC(足够大的话)还可给舵机供电。
APM:Rover可通过电源模块、电机ESC的BEC或外置UBEC给APM供电,外置UBEC或电机ESC的BEC(足够大的话)还可给舵机供电。
供电系统连接要求(JP1安装)
警告:
当连接电源时不要超过最大输入电压,否则将损害你的板子。
警告:
连接USB时如果输入端口有较高电压(接近最大值)会损害主板。 在连接USB前断开与电池的连接或者测试输入电压在规定范围。
电源选项
额定
绝对最高
JP1状态
电源在PWM输出端
5.37V +-0.5
6V
JP1连通
电源在PWM输入端
5.00V +-0.25
5.5V
JP1连通
无电源模块和舵机,且使用ESC的BEC供电
如果你没有电源模块也不使用舵机。
确定JP1已经安装,通过ESC的BEC提供必需的电源。
连接ESC的BEC正极和地线到APM任意输出端口的正极和底线针。
断开剩下三个接口的BEC电源线。
确保ESC的信号线连接到APM输出端恰当的信号针。
你必须确认ESC的BEC有足够的供电能力(至少2A)。
大多数20A或更高的ESC都有2A的BEC。
无电源模块但要使用舵机,且有大功率外置BEC
如果没有电源模块但要使用舵机,你可以使用大功率外置BEC。
确定JP1已经安装,通过大功率外置BEC(5-10A或更高)提供必需的电源。
BEC的电源必须提供至APM输出端的某对针上。
警告! 断开所有ESC的BEC电源线(它们会和外置BEC冲突)。
需要多大的BEC由你的舵机决定。
你需要额外的2-3A给APM、接收机供电及预防(掉电)。
驱动舵机的电源正极必须从输出端口取电。
即使舵机信号线连接至地址端口,也要这样做。
这个选项需要你负责提供充足的电源防止掉电。
无电源模块但要使用舵机,且有多个ESC的BEC(每个舵机用一个BEC)
如果没有电源模块但要使用舵机,你可以使用多个ESC的BEC。
确定JP1已经安装,把一个ESC的信号线和电源线插入输出端口。
去掉剩下ESC的电源线和地线,只留信号线。
把每个ESC的信号线插入对应的输出端接口。
你可以用热缩管把它们套起来,或者插入到你飞行器的合适多线端口。
分别连接每个BEC和每个舵机的电源线和地线。
去掉或者用热缩管包起多余的BEC电源线和地线。
ESC的BEC电源必须接到APM输出端的一对插针上。
只把舵机的输入信号线插到合适的输出端口或者地址端口。
ESC的BEC至少2A。
ESC的BEC的底线和电源、内部信号的底线一直,因此这样给舵机接地没问题。
供电系统不连接的要求(JP1不安装)
警告: 当连接电源时不要超过最大输入电压,否则将损害你的板子。
警告: 连接USB时如果输入端口有较高电压(接近最大值)会损害主板。 在连接USB前断开与电池的连接或者测试输入电压在规定范围。
电源选项
额定
绝对最高
JP1状态
电源在PWM输出端
5.00V +-0.5
6V
JP1开路
电源在PWM输入端
5.00V +-0.25
5.5V
JP1开路
有电源模块无舵机
如果你有电源模块且不使用舵机。
确保JP1没有安装
连接电源模块至APM电源模块接口,以提供必需的电源。
当连接你的ESC到输出端口时,去掉每个BEC的电源线。
或者只连接ESC的信号线至输出端口。
有电源模块且使用舵机和外置BEC
如果你有电源模块和外置BEC,你可以使用舵机。
确保JP1没有安装
连接电源模块至APM电源模块接口,以提供必需的电源。
连接充足电源的外置BEC至输出端口的一对电源插针。
当连接你的ESC到输出端口时,去掉每个BEC的电源线。
或者只连接ESC的信号线至输出端口。
有电源模块且使用ESC的BEC给舵机供电
如果你有电源模块且在去掉JP1的情况下使用舵机。
连接电源模块至APM电源模块接口,给APM和接收机供电。
一个ESC的BEC必须给所有舵机提供足够的电源。
连接ESC到输出端口时,保留一个,去掉剩下BEC的电源线。
或者或者只连接ESC的信号线至输出端口,除了一个ESC。
这个ESC的三根线都和输出端连接。
无电源模块且使用连个ESC的BEC给舵机供电
如果你没有电源模块且在去掉JP1的情况下使用舵机。
连接一对ESC的BEC电源线至APM输入端口,给APM和接收机供电。
连接另一对ESC的BEC电源线到输出端口。
一个ESC的BEC必须给所有舵机提供足够的电源。
去掉剩下ESC信号电源线。
连接ESC的信号线至对应的输出端口。
APM供电布线举例
警告: 超过上表规定的绝对最高电压时,可能会导致电路因此损坏。
警告: 连接USB时如果输入端口有较高电压(接近最大值)会损害主板。 在连接USB前断开与电池的连接或者测试输入电压在规定范围。
当你设置和测试飞控的时候,你可能在工作台上给飞控板USB通电。
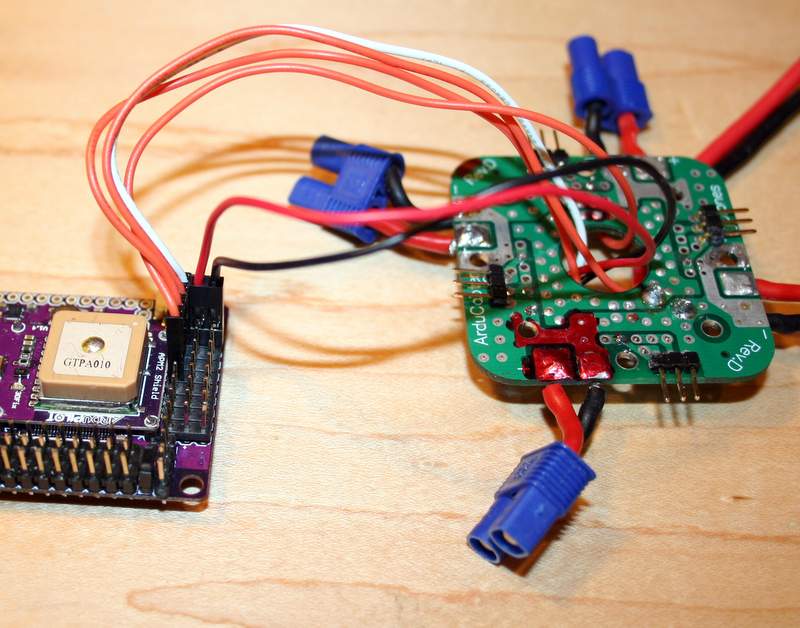
但在你的飞行器中, 你需要通过板载电源系统给它供电,这通常使用ESC或电源模块从电池取电。
在多轴中,可通过分电板(PDB)获得,一个ESC或电源模块的突破5V输出将使电池耗损。
在下图中,红色和黑色的线是从分电板引出的5b m hV电源线。
你可以把他们插在APM任意输出端口的5V和地线两针(中间和外侧)。
在此例四轴中其他四根橙色和白色线是连接到PDB的信号线,在APM 2.5中用来控制每个ESC。
下图是APM2,其原理也使用APM2.5。
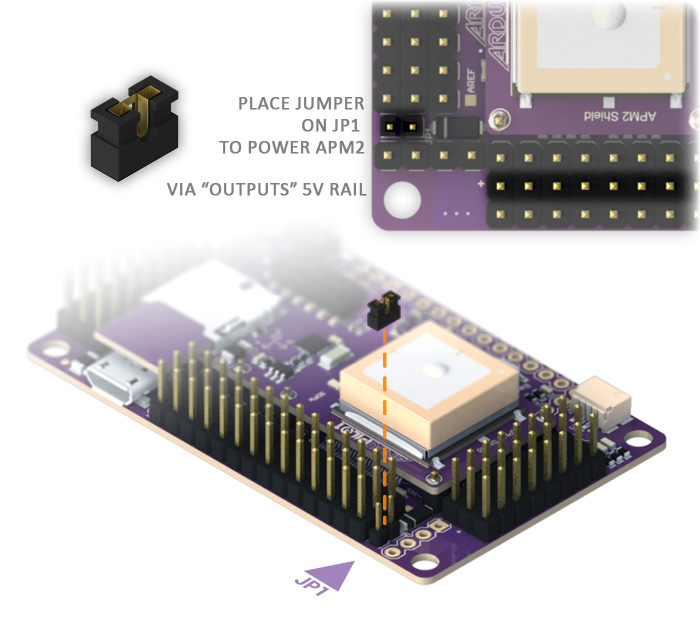
使用两个独立电源给APM2.5供电也是合理的,一个给输入端的接收供电,另一个给输出端供电(舵机或ESC)。
这取决于JP1针(见下图)。
如果装了跳线,这是出厂默认的,飞控板通过输出端或USB供电。
如果没装跳线,飞控板通过输入端供电,但是输出端需要自己的电源。
这样设置的用处是飞行器可以有两套独立的供电系统,一个给舵机供电另一个给电子设备供电。
最佳输入电压是5.37v +/-0.0v,通常ESC做不到。
警告: 超过上表规定的绝对最高电压时,可能会导致电路因此损坏。
在某些时候把输入电压设置的略高于中间值(但低于最大值)是一个不错的主意,因为瞬时大电流时电压可能会降低。
APM2.5自身需要相当少的电流(200mA),一个能提供300-500mA电流的电源就能提供较大的余量。
然而要用同一个电源驱动舵机或其他耗电设备,你需要考虑这些设备的功率需求并提供足够余量防止灾难性的掉电。
例如,一个数字舵机可轻易消耗1-5A电流,这取决与它的大小和性能。 (注: ESC并不从APM消耗电力)如果你有过莫名重启或其他奇怪行为,这可能是APM受干扰或供电不足。
和所有逻辑板一样,来自电机、舵机或电源上其他高电流设备的电气噪音将会引起不可预测的行为。
在这种情况推荐使用电源滤波器。
过短或过长的电源线、不好或陈旧的连接、APM电源供电能力不足,都可能出现掉电显现,导致不可预测的行为。
在传统的直升机中所有舵机会在短时耗电3-20A是很正常的。
电源必须适应压降或者电压峰值的情况。 高品质开关型BEC就是这些其中之一或这些其中一个这个方案取决于电流需求的综合。
大部分这种类型的稳压器都是可编程的,可记录APM2安全操作范围。 线性稳压器不推荐因为它们低效、有过热倾向、热会诱发失败。
APM绝不能直接和任何电池直接连接。
电源问题很常见,且复杂令人沮丧。
做事必须认真。
没有纯净电源,任何自动驾驶仪或飞控都是无效的有潜在危险的。
下图是APM2,其原理也使用APM2.5。
在APM板底部焊接跳线的说明

APM2.5飞控板的特性
APM2.5飞控板的可选择装配件
Quadzimodo用SketchUp 8创作了一个很漂亮的可编辑的APM 2.5飞控板模型: APM 2.5 Google Sketchup 文件
模拟输入针脚
针脚0-8: 在AMP的下部有一排模拟量输入针,飞控板下部标识为A0- A8。 0-8针是可使用的变量针。
所有这些针需要5V,可以用于任何一般的模拟输入。 它们通常用于空速和声纳输入。
针脚12:电源管理连接针,接受5V,通常以17:1的比例连接到3DR电源块。
针脚13:电源管理连接针,接受5V,通常以10.1:1的比例连接到3DR电源块。
数字输出针脚
APM2使用同样的9个模拟量输入端口为数字量输出端口。
他们自动被配置为数字输出针当你开始使用数字输出。
针脚54-62: 需要添加54针脚来转换模拟针为数字针。
因此54针是A0数字输出针连接器。
58针是A4等。
这些针通常使用RELAY_PIN RELAY_PIN4参数,可控制照相机快门、瓶子下降等。也可作为声纳“停止”针,可同时使用多重声波而互不干扰。