APM:Copter参考手册目录5.3-调试
APM:Copter参考手册目录5.3-调试
目录
1 调试
2 概览
3 Roll/Pitch调试
4 Yaw调试
5 高度调试
6 漫飞调试
7 飞行中调整
8 PID的视频介绍
概览
默认的PID增益是针对3DR四轴飞行器来的,虽然这些参数适用于很多种类的机架。
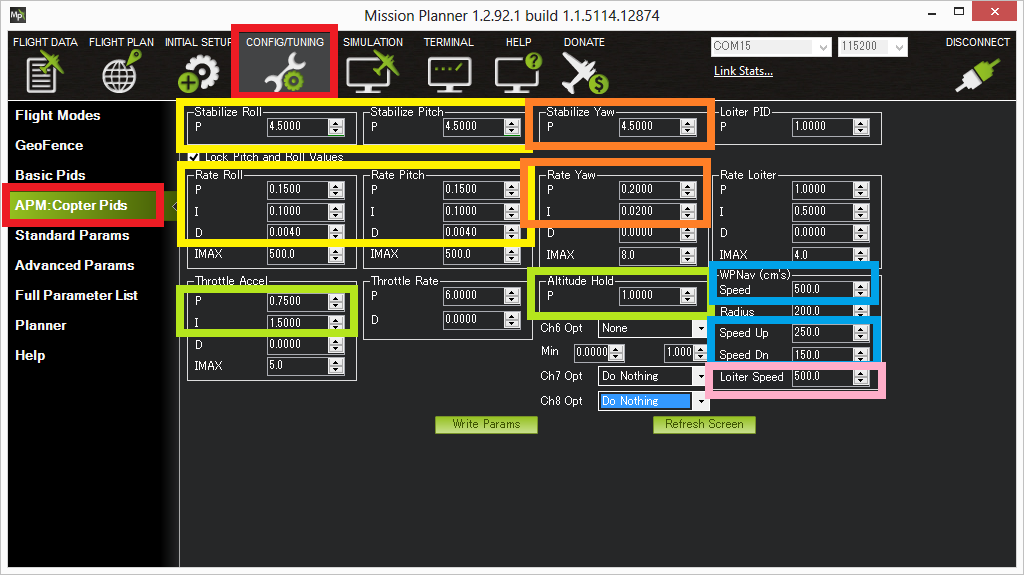
如果想要飞机得到最佳的飞行表现,需要通过Mission Planner的 Config/Tuning里的APM:Copter Pids screen去调整PID参数。
上面的截图列出了Roll/Pitch(黄色),Yaw(橘黄色),Altitude hold(高度保持)(绿色),Lotier(漫飞)(粉色)和Waypoint navigation(航点导航)(蓝色)。
想要飞机得到最好表现中最重要的参数是Rate Roll P(默认状态下,这个值是固定的同一个值)如此处讨论的。
一般最好的调试步骤是,先在Stabilize模式下,调试Rate Roll/Pitch P,然后换到Althold模式调试高度保持,接下来是悬停(一般情况下不需要调试),最后是在Auto模式下调试航点飞行
注意: Dave C的AC2.8.1调试指南提供了很好的信息用于调试roll and pitch的速率,但是高度保持、漫飞和导航自AC2.8.1后发生了灰常大的变化,所以这些部分就不再可用了。
Roll/Pitch调试
截图里黄色方框内的Stabilize Roll/Pitch和 Rate Roll/Pitch参数用来控制Roll和Pitch响应。
这些比率参数(将期望的值按比率转化为电机输出值)时非常重要的。
Roll和Pitch的速率P调试页面有调试它们的多数信息。
Stabilize Roll/Pitch P将期望的角度值转化为响应的旋转速率,然后反馈给速率控制器。
一个较高的值将使飞机对roll/pitch响应更加剧烈,较低的值将使飞机响应温和一些
如果这个值设置的过高,飞机将在roll或者pitch轴上摇摆不定
如果这个值设置的过低,飞机将对输入的变化反应迟钝
调整roll和pitch的更多信息可以在自稳模式页面的调试章节找到。
可以通过数据闪存日志里的ATT消息,经过绘图后直观的查看Roll-In vs Roll,Pitch-In vs Pitch的表现。
在Stabilize或者AltHold模式下Roll应该和Roll-In接近, Pitch应该和Pitch-In接近。
另一种方法,你可以通过自动调参特性来调试速率和自稳的值。
Yaw调试
截图里橙色方框里Stabilize Yaw和Rate Yaw控制着飞机对yaw的响应。 Yaw也需要不断的调试。
与roll和pitch相似,如果Stabilize Yaw P或者Rate P设置的太高,飞机将会摇摆不定。
如果太低,飞机有可能不能保持它的机头朝向。
就像在自稳模式调试章节所说,参数ACRO_YAW_P控制着当飞手在Yaw上输入时,飞机以多快的速度旋转。
默认值是4.5,代表将偏航摇杆向左或者向右打到最高时,自旋速度是200°/秒。 更高的数值代表更快的自旋速度。
高度调试
与高度保持相关的调试参数在截图中绿色的方框中。
Altitude Hold P用来将高度误差(期望高度和实际高度的误差)转化为一个期望爬升或者降落比率。
一个较高的比率将使飞机更加积极的保持它的高度,但是如果设置的太高,飞机对油门的响应将会出现抽动。
Throttle Rate(一般不需要调试)将期望的飞机爬升或者降落速率转化为一个期望的爬升或下降的加速度。
Throttle Accel PID 增益将加速度误差(即期望加速度和实际加速度之间的误差)转化为电机输出。
在修改这些参数时,一般需要将P:I保持在1:2。
不要试图增加这些数值,如果你的飞机动力足够强劲,将这些值减少50%(即P=0.5,I=1.0),可能会得到更好的响应。
查看高度保持飞行模式页面获得更多信息。
漫飞调试
如果Roll和Pitch调试正确,GPS和罗盘设置正确并且表现良好,并且震动水平处在能接受的水平上,漫飞一般不要需要很多调试。但是请查看漫飞模式页面获得包括水平速度在内的更多可调整参数的细节。
飞行中调整
在飞行中可以使用遥控的第6通道旋钮调试一个单独的参数。 一个调试Roll/Pitch速率P值的具体的例子可以在Roll和Pitch的速率P调试wiki页面找到。 在Mission Planner’s Config/Tuning 的 APM:Copter Pids页里,选择 6通道下拉菜单,在那里可以看到所有可以调试的参数。
在设置了6通道值后,最大和最小的值应该设置在一个合理的范围内(即不能是0,也不能异常高),然后通过选择6通道开关,点击“Refresh screen”,以保证参数确实已经被更新正确。
PID的视频介绍
PID(比例-积分-微分)是我们的固件用来不断稳定模型的方法。
比例=立即修正: 偏离更大修正就更大。
积分=经过一段时间的或是稳态的修正: 如果我们没有取得进展添加附加修正。
微分=轻轻松松的修正 修正太快了?它可以把它慢下来(抑制)一点,避免超调。