APM:Copter参考手册目录4.1.15-跟随模式 Follow Me! Mode
APM:Copter参考手册目录4.1.15-跟着我!模式 Follow Me! Mode
跟随模式 可以让飞机像“跟屁虫机器人”一样, 你上哪他就跟你去哪!
跟随模式基于APM:Copter动态航点功能和MAVlink遥测命令。
你需要有:
一个带数传的APM多轴飞行器
笔记本
一个USB接口的GPS或蓝牙GPS模块。
操作指南
设置其中一个飞行模式为“悬停”
在一个空地,设置APM:Copter,通过MAVlink建立一个无线连接
USB GPS或蓝牙设备连接笔记本后,确保显示一个串行端口。使用模块随附的软件,确保GPS工作正常,并且搜到卫星。
起飞,一旦成功起飞,就切换到定点模式。(保持足够的高度,以确保飞行器在跟随你时不会伤到你,这可能是个不错的做法。)
在Mission Planner飞行数据界面,在附近的位置鼠标右击,接着单击“飞到这里”如果没问题,就可以尝试跟随模式了。
在Mission Planner里按Control-F,会打开下面的窗口。单击“Follow Me”

将弹出此窗口。选择已分配给GPS设备的串行端口,不用管波特率多少。
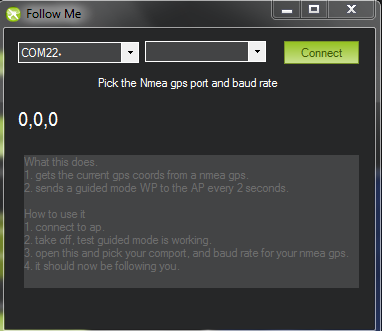
一旦单击“连接”,Mission Planner就从你的设备读取GPS数据,然后每隔两秒给APM飞行器发送“飞到这里”命令。
现在拿起笔记本,开始四处走走吧。
APM飞行器应该会跟着你!
如果你设置高度为1.5米的话可能不错,可以看看你能不能驾驶它。
如前所述,要想避免受伤,就要有保持足够的飞行高度。
不管怎么说,跟随模式一个非常棒的功能,但尤其是没有对螺旋桨采取保护措施的情况下,使用“跟着我模式”时,一定要注意安全!
警告:和其他模式一样(悬停、定高),飞行器测量高度是依赖气压计,这就意味着随着时间的变化,飞行器发生漂移,飞行器的高度会随着气压变化,而不是实际的高度。