APM:Copter参考手册目录4.1.9-简单和超简单模式 Simple and Super Simple Modes
APM:Copter参考手册目录4.1.9-简单和超简单模式 Simple and Super Simple Modes
目录
1 简单和超简单模式
2 正常模式
3 简单模式
4 超简单模式
5 用通道7/通道8切换正常、简单、超简单模式
“简单”模式和“超级简单”模式用于与稳定、运动、飘移、降落这些飞行模式结合使用。
这两个模式可以让飞手从自己的视角控制飞行器,无论飞行器正面临着哪一个方向。
可用于对于还没学会根据模型方向调整roll和pitch的新手,或是飞行器飞的太远了看不清它的头的朝向。
简单模式可以让你用起飞时的头的方向控制飞行器,仅需要较好的罗盘指向。
超简单模式可以让你以飞行器朝向家——解锁位置的方向控制飞行器,但需要较好的GPS定位。
这两个模式可以分配到某个飞行模式的开关位上,也可以通过通道7/通道8进行开关。
正常模式
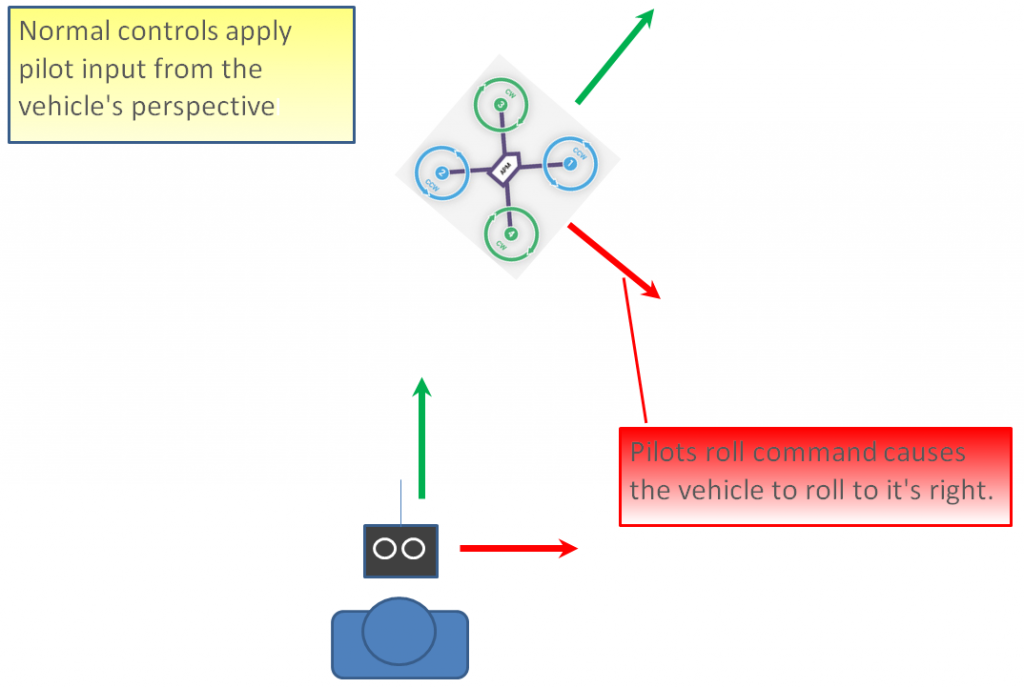
在不用简单和超简单的情况下,飞手的发射机摇杆输入是对不断旋转着的飞行器进行操作的。 拿上方图示举例,当飞手进行向右(红色)的roll的控制的时候,模型会向它自己的右侧横滚。
如果飞手和飞行器在同一方向,控制起来就相对简单,但是如果飞行器面对着飞手,没有经验的飞手就会感觉控制全都反了。 换句话说,飞手向右控制roll,从飞手的视角来看模型是向左移动的。
简单模式
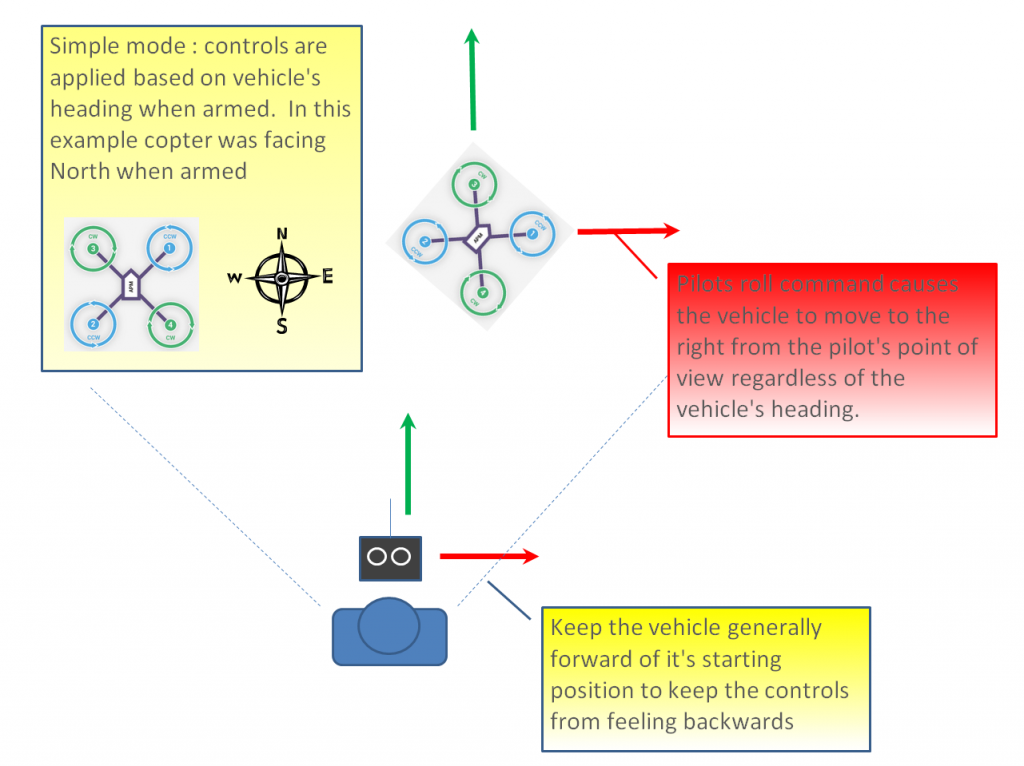
和别的系统(MultiWii等)的“无忧(carefree)”模式差不多,这个模式可以让你飞飞行器的时候,就像它一直是它解锁时的方向一样,不用管它现在转到了什么方向。 如果你向前推pitch摇杆,飞行器就会飞离你,向后推pitch摇杆,飞行器就会朝家的方向飞回来。 你甚至可以操作yaw任意旋转飞行器,但是用摇杆控制飞行器移动时是和起飞时一样的。
通常,解锁时你应该站在模型的后面,模型的机头指向正前方。 在飞行中应保持模型在起飞位置的前面,因为如果它飞到了你身后,你就会感觉所有操控都反了。
如上所述,在飞行器飞得太远了看不清头的朝向的紧急情况下,简单模式也是非常有用的。
超简单模式
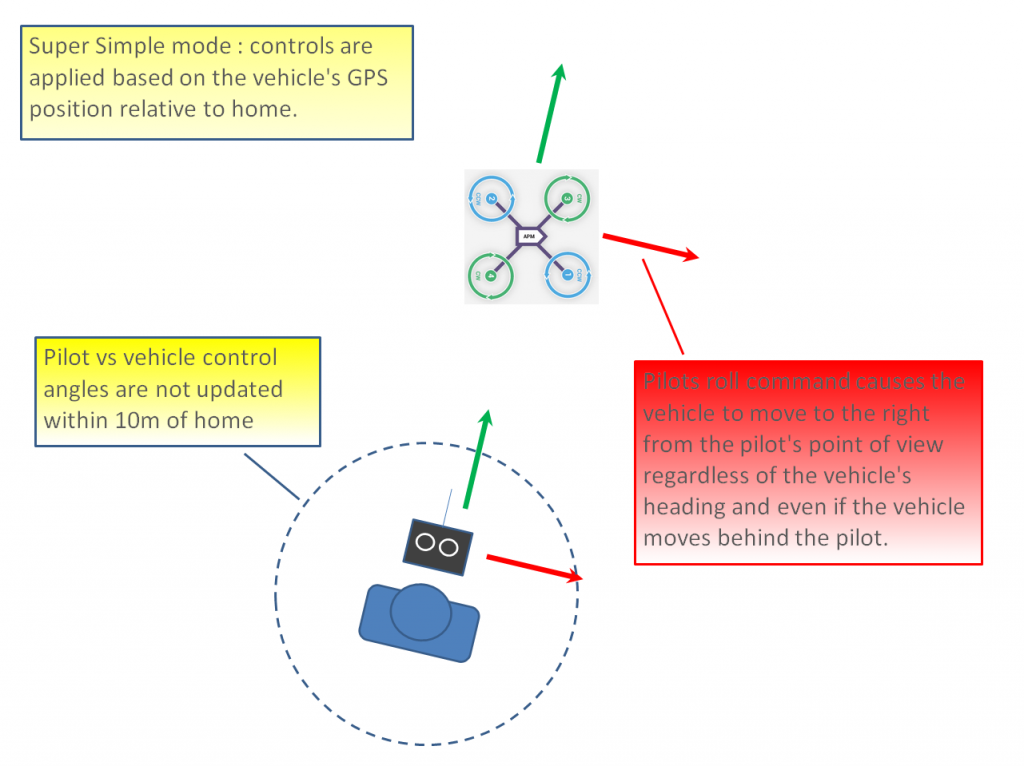
超简单模式和简单模式是基本相同的,除了它用的是模型的位置与家的位置相关联,不是用的模型最初解锁时的头的方向。 这就是说不用管模型在哪,也不用管模型朝向哪,只要向后拉pitch就会让飞行器朝家的方向飞。
相较简单模式的优点就在于即使飞行器飞到了飞手或是家的后面,飞手还可以用自己的视角来控制。
如果向右拉满roll,模型就以飞手为中心顺时针绕圈飞(尽管因为“时滞”每圈半径都有可能会增长一点)。
缺点是这个模式需要GPS定位,所以你要确保在起飞之前GPS已经定位。
模型在家10m以内时,方向是不会更新的,所以要避免在家附近飞。
在起飞时要确保控制是正确的,和简单模式一样,你应该在解锁时站在模型后面,飞手和模型所朝方向也应是一样的。
用通道7/通道8切换正常、简单、超简单模式
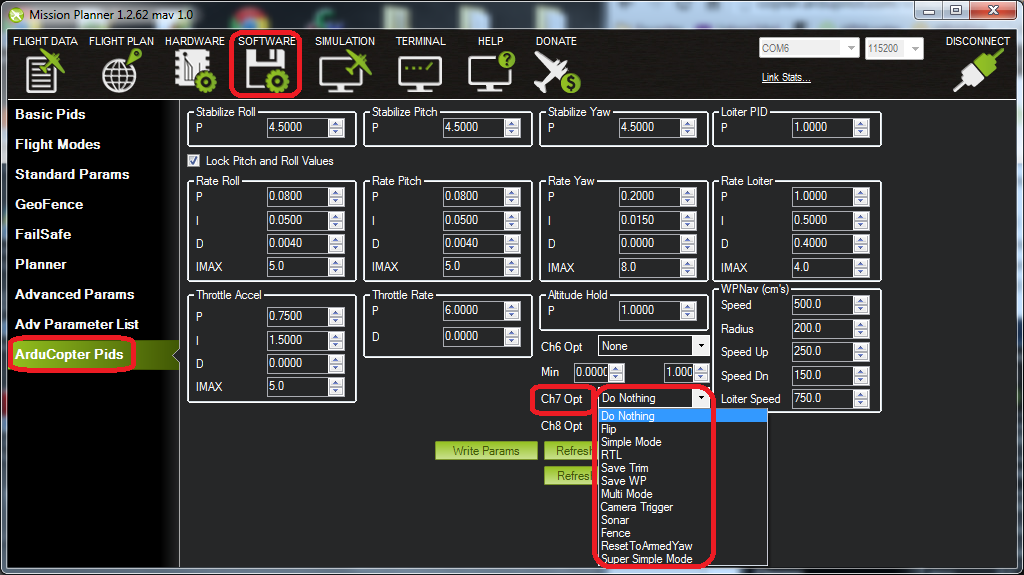
通道7或者通道8可以设为简单模式和超简单模式的开关。 如果选择了简单模式,把开关打到高位就会启用简单模式,低位就会禁用。 如果选择了超简单模式,开关打到高位就会启用超简单模式,低位就会禁用,如果使用的是三段开关,中间位置会启用普通简单模式。 通道7和通道8中只应有一个设为简单模式或超简单模式,不要同时设置。 通道7/通道8开关会覆盖在飞行模式界面设置的简单/超简单选项。