Pixhawk快速入门
目录
0.组成部分
1 Pixhawk快速入门
2 准备开始
3 在飞行器上安装Pixhawk
4 将Pixhawk与你的多轴飞行器连起来
5 加载固件至Pixhawk
6 安装Planner
7 校准你的Pixhawk
8 Pixhawk指示灯的含义
9 Pixhawk安全开关含义(红色LED)
10 Pixhawk接口
11 Pixhawk规格
1.组成部分:
1.1 在外壳里面的装着SD卡的Pixhawk:

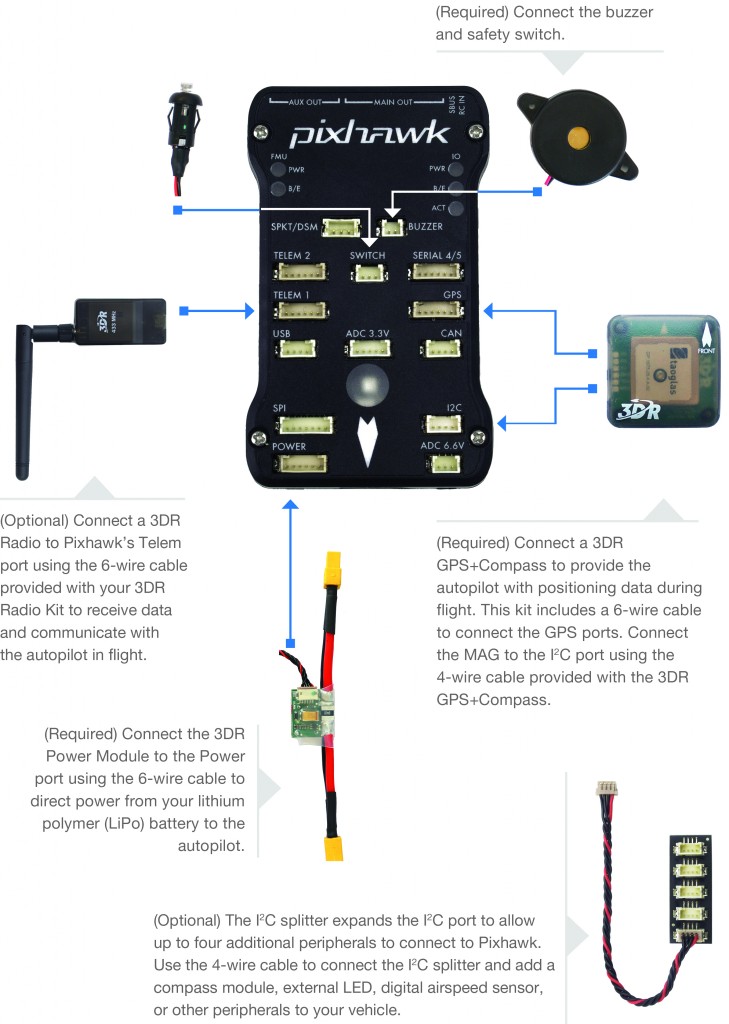
1.2 蜂鸣器:

1.3 安全开关:

1.4 电源模块:

1.5 一个SD卡USB适配器
1.6 一条Micro-USB线
1.7 两根6pin线
1.8 一个减震板和几个减震棉。
1.6 你还需要一个GPS模块,而且一个集成在GPS里面的罗盘可以更方便地降低外界的干扰。

- 准备开始
你需要一个多轴飞行器: 请参照如何做一个你自己的多轴飞行器Wiki页面。
有了APM固件的帮助,Pixhawk可以把各种遥控飞机、飞行器、无人车变成一个全功能的无人飞行器。
在你拥有了一个完整安装好的多轴飞行器后,请按照以下步骤来安装你的Pixhawk。
在飞行器上安装Pixhawk
将Pixhawk与你的多轴飞行器连起来
加载固件至Pixhawk
校准你的飞行器
3.在飞行器上安装Pixhawk
请使用双面减震棉把Pixhawk安装在飞行器上。
裁剪出四块约3/4平方英寸的减震棉,然后粘在Pixhawk的每一个角上。
最好将Pixhawk安放在模型的重心处。
确认Pixhawk的箭头标指向飞行器的机头。

4.将Pixhawk与你的多轴飞行器连起来

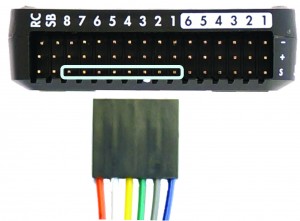
把PPM总线或者Futaba SBUS 接收线(黑色地线、红色电源线和白色信号线)接在最左边的RC接口上。
SB接口是给Futaba SBus预留的,功能尚未完善。
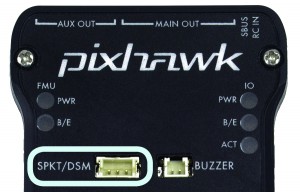
对于Spektrum DSM,DSM2或者DSMX 卫星接收机,直接接在SPKT/DSM接口。

把从(3DR)分线板引出的一根红黑两根的线接在Pixhawk的任意一个地线(-,黑线)和电源线(+,红线)输出针脚。
警告!供电接口必须有5V或者与你的舵机相对应的电压,不能直接与电池相连。
你可以使用ESC的5v电压BEC输出或者用于舵机的足够功率的单独UBEC供电。
这种接法是可选的,仅在用Pixhawk给外接舵机供电时才是必须的。
对于飞行器,将每根信号线从PDB板与Pixhawk上其对应的信号针脚相连。
把每个电机的信号线与对应的信号针脚相连。
针脚 1 = 电机 1 – – 针脚 5 = 电机 5
针脚 2 = 电机 2 – – 针脚 6 = 电机 6
针脚 3 = 电机 3 – – 针脚 7 = 电机 7
针脚 4 = 电机 4 – – 针脚 8 = 电机 8
对于固定翼飞机,把每个通道的信号线与主信号输出针脚相连。
针脚 1 = 副翼
针脚 2 = 升降舵
针脚 3 = 油门
针脚 4 = 方向舵
对于无人车,把油门和方向的信号线与主信号输出针脚相连
针脚 3 = 油门
针脚 4 = 转向
5.加载固件至Pixhawk
APM固件是自动驾驶仪运行的大脑。
在加载固件至pixhawk之前,需先在地面站电脑上安装mission planner。
选择windows里的Mission Planner或者Mac与Linux里的APM Planner。
从(这里!)下载用于Windows的Mission Planner然后点击橙色的Download按钮。
从(这里!)下载Mac或者Linux版的Mission Planner(注意这还没有安装!)
Mac系统请选择APMPlanner – DMG – 最新然后点击橙色的Download按钮。
Linux系统请选择APMPlanner – RPM – 最新并选择橙色的Download按钮。
- 安装Planner
在选择正确的文件后,仔细阅读接下来页面的安全说明然后点击“Download”。
打开文件运行安装向导。
在通过系统安全警示后,安装全部建议的驱动。
在安装完成后,打开MissionPlanner应用。
用micro-USB线把Pixhawk连接至你的电脑。
你的电脑将自动安装正确的驱动。
这时请不要点击“连接”按钮,Pixhawk只有在与Mavlink “未连接”的时候才可以加载固件。

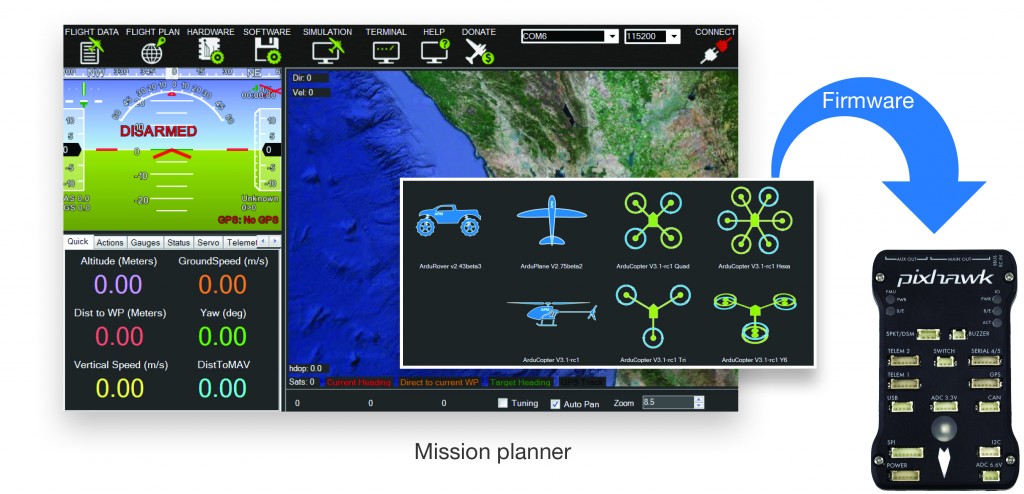
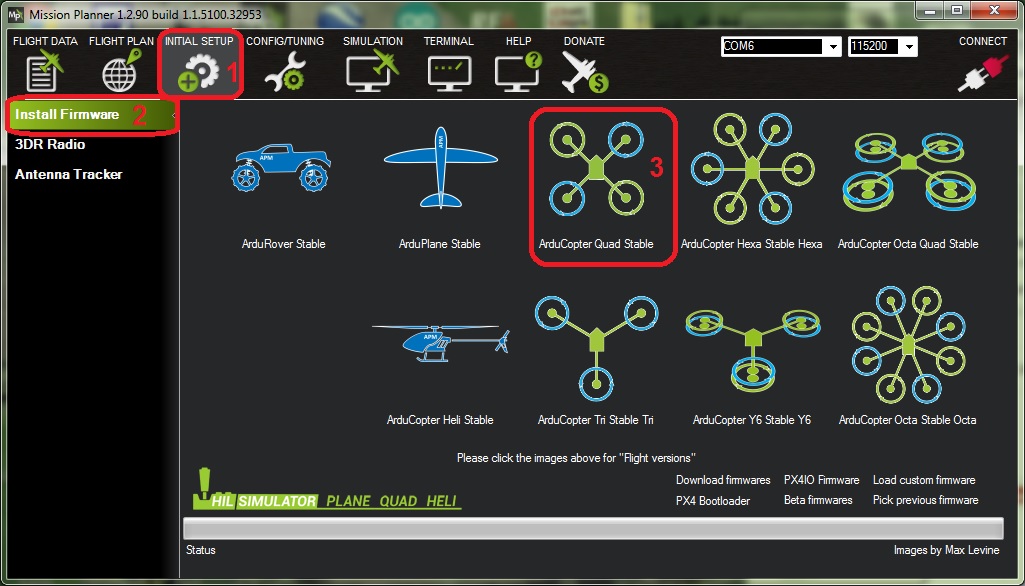
在Planner程序里选择初次安装图标。
然后在左边栏内选择Install Firmware项。
接下来选择你想加载固件的模型类型。
当你想执行操作时,会有确认提示。
当指示条显示下载完成后,断开USB将飞控断电然后重新接上电脑供电。
如果你听到了一段乐音,你的固件安装就完成了。
如果你听到一连串的三次嘟嘟声,先断开USB,然后按住安全按钮,再重新连接USB。
重启之后,一连串的两次嘟嘟声表示固件已经成功加载。
7.校准你的Pixhawk
校准你的在飞行器上使用的Pixhawk,请到这个Wiki页面。
然后到(这里!)执行电调校准。
然后再到(这里!)正确设置电机旋转方向。
校准你的在飞机上使用的Pixhawk,请到这个Wiki页面。
然后到(这里!)检查传感器。
然后到(这里!)设定舵机方向和副翼或升降副翼模式。
如果你的副翼设置在两个通道上,你可以在(这里!)设置它们。
如果你有襟翼,你可以在(这里!)设置自动襟翼
如果你的升降副翼是分离的,你可以在(这里!)设置不同的扰流器
- Pixhawk指示灯的含义
红灯和蓝灯闪: 初始化中。 请稍等。
黄灯双闪: 错误。 系统拒绝解锁。
蓝灯闪: 已加锁,GPS搜星中。 自动导航,悬停,还有返回出发点模式需要GPS锁定。
绿灯闪: 已加锁,GPS锁定已获得。 准备解锁。 从加锁状态解锁时,会有快速的两次响声提示。
绿灯长亮加单次长响:GPS锁定并且解锁。 准备起飞!
黄灯闪: 遥控故障保护被激活。
黄灯闪加快速重复响:电池故障保护被激活。
黄灯蓝灯闪加高-高-高-低响: GPS数据异常或者GPS故障保护被激活。
- Pixhawk安全开关含义(红色LED)
快速,持续闪烁:执行系统自检中。 请稍等。
间歇闪烁: 系统就绪。 请按安全开关按钮以激活系统。
常亮:已经准备好解锁。 可以执行解锁程序。
10.Pixhawk接口
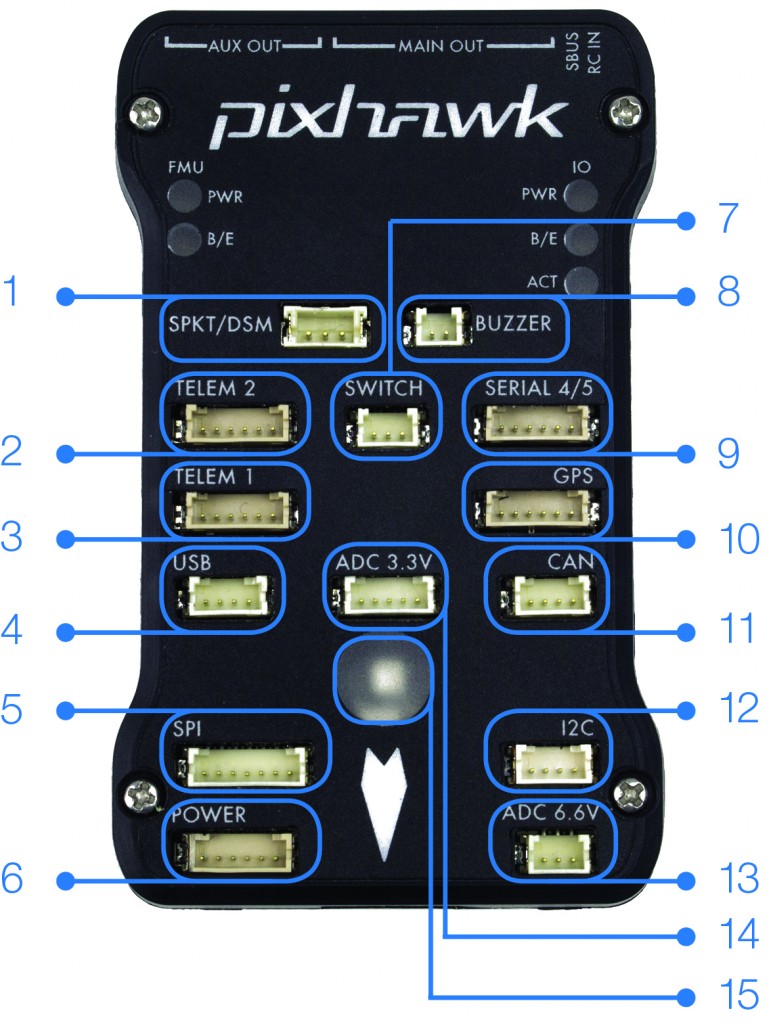
1 Spektrum DSM 接收机
2 遥测(电台遥测)
3 遥测(屏幕上显示)
4 USB
5 SPI (串行外设接口)总线
6 电源模块
7 安全开关按钮
8 蜂鸣器
9 串行
10 GPS 模块
11 CAN (controller area network)总线
12 I2C 分流器或罗盘模块
13 模拟至数字转换器 6.6 V
14 模拟至数字转换器 3.3 V
15 LED指示器



1 输入/输出重置按钮
2 SD卡
3 飞行管理重置按钮
4 Micro-USB接口
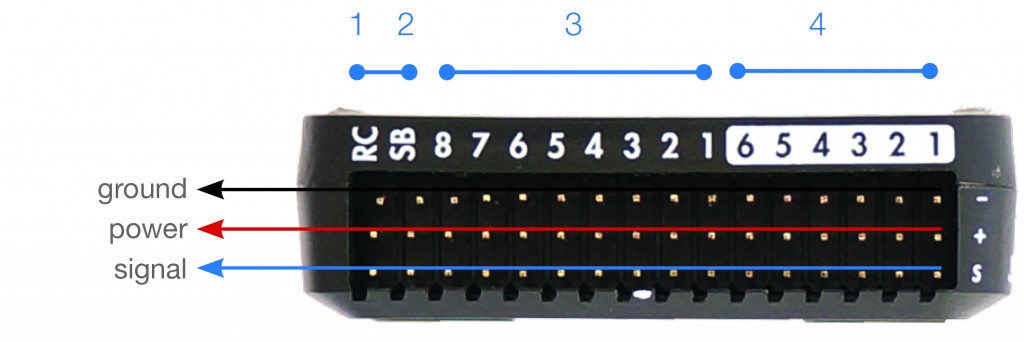
1 遥控接收机输入
2 Futaba S.Bus 接收机输入
3 主输出
4 辅助输出
- Pixhawk规格
处理器
32位ARM Cortex M4 核心包含FPU(浮点运算单元)
168 Mhz/256 KB RAM/2 MB 闪存
32位故障保护协处理器
传感器
ST Micro 16位陀螺仪
ST Micro 14位加速度计/磁力计
MEAS 气压计
电源
良好的二极管控制器,带有自动故障切换
舵机端口7V高压与高电流预备
所有的外围设备输出都有过流保护,所有的输入都有防静电保护
接口
5个UART串口,1个支持大功率,两个有硬件流量控制
Spektrum DSM/DSM2/DSM-X 卫星输入
Futaba S.BUS 输入和输出
PPM sum 信号
RSSI(PWM或者电压)输入
I2C, SPI, 2个CAN, USB
3.3 与 6.6 ADC 输入
尺寸
重量 38g
宽 50 mm
高 15.5 mm
长 81.5 mm